
解析库卡协作机器人iiwa和传统机器人KR内部结构

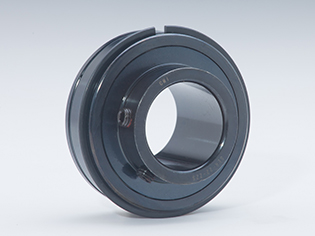
机器人的传动和布局设计从理论上谈应当是较为成熟期的领域,如果有样机,拆下一看就可以告诉大部分的结构。但是在结构优化设计经验、组装规范的标准化、零配件的按须要自定义以及供应链优化等方面国内厂商还必须很长时间的累积。 本文以KUKA为事例,分协作机器人iiwa和传统机器人KR两个大系列。 协作机器人iiwa 当前主流的协作机器人都使用模块化思想的关节设计,使用平驱走电机+谐波减速器的方式,每个关节的内部结构大致相同,只是大小不过于一样,例如iiwa的每个轴基本都是右图这样: 每一个关节中都包括了电机、控制器驱动、谐波减速器、电机末端编码器、关节末端方位传感器和力矩传感器,电机和减速器使用直连。
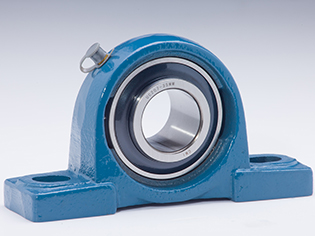
整个关节在机器人内部的布局如下: 传统机器人KR 对于KR系列这一类的传统机器人来讲,末端的布局一般按照符合三轴轴线递于一点的基本原则来做到,主要区别在于三个电机的布置和传动方式。 KUKA之前的很多机器人都使用4、5、6三轴电机布置在小臂后方,通过同心轴+伞齿轮/同步带的方式传动到手腕的方式,以KR5为事例: 三个电机的动力通过同心轴传遍手腕,腕部结构如下: 缩放图: 总结 近几年KUKA新的发售的agilus系列机器人为了执着粗壮灵活的外表,使用了将4、5、6三轴电机内置在小臂内部的方式。 只不过就传统工业机器人来讲,各家主要的差异在于5轴和6轴的布置方式,外资品牌借助很深的设计功底和强劲的自定义能力,广泛使用齿轮或者同步带的方式用于动力传输,将电机布置的较为靠后,因此机器人小臂和手腕部位做到的较为灵活。 而国产厂商受限于成品电机的尺寸、齿轮的精度和噪音、组装经验不足的问题,5、6轴多使用直连或者单同步带的方式,造成腕部尺寸广泛稍大。
本文关键词:爱游戏官网登录入口,解析,库卡,协作,机器人,iiwa,和,传统,内部
本文来源:爱游戏官网登录入口-www.hhavietnam.com


同类文章排行
- 林书豪19+7湖人117-127不敌雷霆 威少27分坎特25+16
- 傅园慧上街卖拉面 一碗拉面卖到了50块(图)
- 英超-哲科梅开二度阿奎罗破门 曼城3-2埃弗顿升至榜首
- 曝恒大拒巴萨首次报价暴力鸟 坚持4000万欧违约金
- 火狐体育:英超有望提前重启,第三轮新冠核酸检测4人呈阳性
- 当老二的感受没人比我懂!皮蓬:支持厄文先甩LBJ
- 罗斯前女友哭泣咬死被迷奸 承认被甩让她很生气
- 阿根廷名单:梅西携阿圭罗回归将连战巴西乌拉圭
- 皇马被曝豪掷1.8亿欧元 将签下姆巴佩
- 8日NBA常规赛鹈鹕vs勇士在线直播观看地址
最新资讯文章
- style="">国务院公布首批28个双创示范基地 4所高校入选
- 北京主场115-106复仇新疆取6连胜 莫里斯35+16+3
- LOL世界选手最新排名大魔王Faker竟然不在前10
- 邹市明WBO蝇量级拳王卫冕战将打响:把金腰带留在中国
- 全英羽毛球赛:中国队两银收官
- NBA难题:下赛季撞车奥运
- 夫妻般默契! 詹皇更衣室预测对韦德后撤步准绝杀
- 央视回应被柯洁怼:求原谅!英语是我们的工作语言
- 贵州省教育厅厅长邹联克告诉你如何确保平安开学顺利开学
- 美媒曝光阿德离开开拓者内幕:他与利拉德性格不合
- 火箭2.4秒绝杀掘金 哈登39+7+11 约基奇22+13
- 为大巴黎操碎心!17岁小将陷入续约难题,虚拟体育姆巴佩耐人
- 爱游戏官网登录入口_意甲-国米遭读秒绝杀终结7场正式比赛不败
- 埃弗顿或3000万报价沃尔科特
- 播求逃避三番战!惧一龙杀人技拿大徒弟做挡箭牌
- 十项全能巨星伊顿与爱妻共同退役 田径情侣曾同场夺冠
- 2017年国家冰壶集训队成立 共50人参加此次活动
- 彩票-乐心小天双色球15064期:蓝球继续走大
- 易建联确定重返CBA 加盟广东还需进行重新注册
- 最新!3月6日31省区市新增确诊病例99例,境外输入确诊病例24例
